No.238 - 我々は脳に裏切られる [科学]
No.149「我々は直感に裏切られる」で、極めて大きな数を私たちは想像できず、そのために直感が働かないという話を書きました。23人のクラスで同じ誕生日の人がいる確率は 50% 以上もあるとか(= バースデー・パラドックス)、10都市を巡回する全ての経路を総当たりで調べるのは家庭用パソコンで2秒で可能だが、32都市となるとスーパーコンピュータ "京" を宇宙の年齢(135億年)だけ動かしても絶対に不可能、といった話でした(総当たりでは不可能という意味)。これらの裏に潜んでいるのは日常生活とは全くかけ離れた大きさの数であり、それが直感に反する結果を招くのです。
今回は、それとは別の直感が裏切られる例をとりあげます。視覚が騙される例、いわゆる "錯視" です。もちろん錯視は昔から心理学の重要な研究テーマであり、数々の錯視図形が作られてきました。その多くは平面図形ですが、今回とりあげるのは立体の錯視です。
明治大学の杉原厚吉教授は数理工学が専門ですが、数々の立体錯視の例を作ってきた(= 発見してきた)方です。その杉原教授が日経サイエンスの2018年8月号に「立体錯視と脳の働きの関係」についての解説を書かれていました。大変興味深い内容だったので、それを紹介したいと思います。それは「我々が視覚によってまわりの立体物をどうやって認識しているのか」というテーマと深く関わっています。そしてこのテーマは人工知能の研究の重要な領域です。
エッシャーの不可能立体
杉原教授が立体の錯視に取り組まれたのはエッシャーの作品の影響が大きいようです。エッシャーの作品を一言でいうと「不可思議な絵(版画)」です。画面を鳥やトカゲが隙間なく埋め尽していたり、蜂が次第に魚に変身していくさまだったりと、いろいろありますが、「不可能立体」による "だまし絵" もエッシャー作品の大きなジャンルになっています。
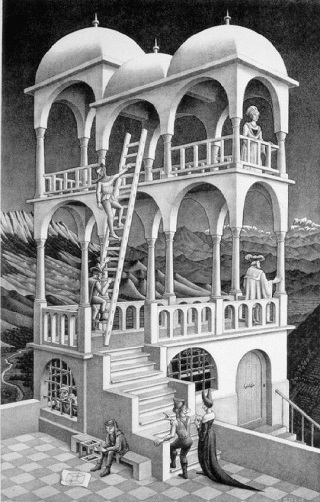
杉原教授があげているエッシャーの《上昇と下降》、《ベルヴェデーレ(物見の塔)》、《滝》の3作品は非常に有名なので、多くの人が知っていると思います。そのうちの《ベルヴェデーレ(物見の塔)》が下図です。
この作品の1階と2階の関係の中に不可能立体が含まれています。また左下で腰かけている男性が持っている立体も、直方体のフレームとしてはありえない構造をしています。
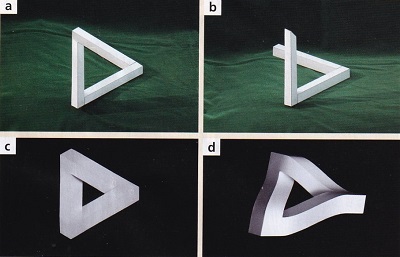
不可能立体とは「絵には描けるけれど物理的な実体としては不可能な立体」ですが、実は工夫をすれば物理的実体として作ることができます。ただし、従来のやりかたは「不連続のトリック」や「曲面のトリック」を使うものでした。「不連続のトリック」とは、物理的実体として不連続だが、ある視点からみるとあたかもつながっているように見えるというトリックです。また「曲面のトリック」とは、実際はぐにゃっとした立体だが、ある視点から見たときだけ平面からできた立体に見えるというトリックです。ペンローズの3角形と呼ばれる有名な不可能立体を、この2つのトリックで作成した例が次の図です。
ここからが重要な話になります。実は、エッシャーの物見の塔の不可能立体は「不連続のトリック」や「曲面のトリック」を使わなくても物理的実体として作成できることを杉原教授は発見しました。
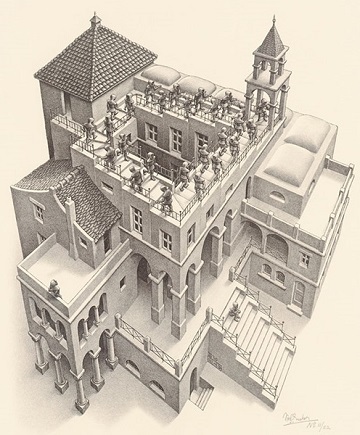
杉原教授もあげているエッシャーの有名な作品に《上昇と下降》があります。建物の屋上を周回する階段が描かれていますが、上り続ける人はいつまでも上り続け、下る人はいつまでも下る「無限巡回階段」になっています。
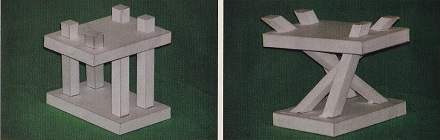
杉原教授はこの「無限巡回階段」も物理的に作成できることを示しました。それが次の図です。
「杉原版・物見の塔」と「杉原版・上昇と下降」における重要なポイントは、
の3点です。また、上の引用のところで杉原教授は「線図形からそこに描かれている立体図形を自動抽出できるロボットの目を開発しようという研究の中で私はこのトリックを見つけた」と書いていますが、ここも重要なポイントです。
人間の網膜に写る外界の像は平面です。人間の脳はそこから外界の立体とそれらの位置関係を推定します。それを無意識にリアルタイムに直感的に行っています。どうしてそれができるのか。目が2つあるからというのは当たりません。確かに両目の視差で奥行きが推定できますが、たとえ片目でも、かつ、全く初めての光景に出会ったとしても、立体とその位置関係が推定できます(ためしにやってみると分かる)。
ロボットやそれに相当する機械(自動運転のクルマや建機など)の "眼" も平面の画像センサーでできていて、基本的に人間の目と同じです。周りの状況に応じて動きが変化する精密なロボットを作ろうとすると(たとえば乱雑に置かれたモノを掴むロボット)、平面の画像がら立体を推定する必要がでてきます。クルマで言うとスバルのアイサイトのようなステレオカメラを使うこともできますが、コストアップになるし調整も大変です。あくまで1個のレンズとセンサーで実現したい。
このとき、人間がどうやって立体の認識をしているのかが解明されると、それをロボットに応用できる可能性が大です。杉原教授の研究と産業応用の関係はそうなります。
非直角のトリックによる立体錯視
人間は網膜に映る2次元画像から3次元をどうやって推定しているのでしょうか。下図のように、同一の網膜画像に帰着する3次元形状は無限にあります。これらの中から人間は特定のものを直感的に選択しています。「ものを見る」ということはそういうことです。
人間はその選択をどうやっているのか。そのことを推測できる立体錯視を杉原教授は作成しています。
「脳は、画像に映っている立体の無限の可能性の中から直角のなるべく多いものを選らんで即座に思い浮かべてしまう」というのが、杉原教授の仮説です。この脳の作用と関係する錯視が、つぎの変身立体です。
変身立体
杉原教授は、ある特定の2方向から見ると全く違った形に見えてしまう立体を作成しました。鏡を使うとこの錯視が非常に効果的になります。下の写真の左は、そのまま見ると円柱に見え、鏡を通してみると4角柱に見えます。杉原教授はこのような立体を「変身立体」と名付けました。
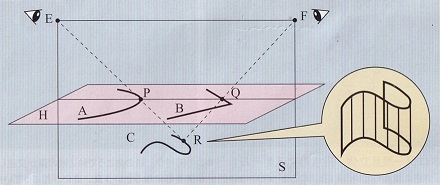
一つの視点からみると円弧に見え、別の視点から見ると2直線に見える空間曲線の作り方を示したのが次の図です。
杉原教授は「変身立体」は2016年の「Best Illusion of the Year Contest」で準優勝しました。その時の動画がYouTubeに公開されています。3Dプリンタの出現によって初めて製作可能になった立体と言えるでしょう。
立体錯視が提示する課題
立体錯視を起こす人間の脳の振る舞いは、心理学・認知科学・脳科学へ新たな研究課題を提供しているようです。杉原教授はそれを2つに分けて説明しています。
動物実験という手はあります。つまり、動物を直角の無い環境で育てることは可能です。ただし、動物が立体錯視を起こしているかをどうやって調べるのか、その方法論が問題です。また、杉原教授もことわっているように「脳は直角を好む」というのは、現時点では仮説です。
脳の高度な情報処理
立体錯視は脳の働きによって起こります。つまり脳が現実を裏切ることになるわけです。それはもちろん "脳を騙す" ような立体を人間が意図的に構成したからです。このことを裏返すとどうなるかと言うと、
ということです。もちろん意図的に脳の "裏をかく" ことはできます。しかしほとんどの場合、脳の瞬時の情報処理は正しいし、我々はそれで問題なく生活しています。脳は2次元画像から物体の形を推定するだけでなく、複数の物体の位置関係を把握します。それは "あたりまえ" であり、我々が疑問をもつことがありません。しかし考えてみると、これはすごいことです。もしコンピュータに(AI技術も駆使して)やらせようとすると非常に難しい。
画像から物体を認識することだけなら実用化されています。たとえば前方衝突防止ブレーキがついたクルマでは、この機能を単眼カメラの画像だけでやっています。これは前方にあるクルマ、歩行者、バイク、自転車など、道路の上によく現れる物体の知識をもとにして画像から物体を判定しているわけです。そして道路と物体の接地部分を画像で判定し、単眼カメラの地上高と仰角から三角測量の原理で距離を計算している。つまり「事前知識をもとに画像から物体を検出し、物体までの距離を推定する」ことなら実用になっています。しかし、人間の脳がやっているような「事前知識なしに、画像だけから物体の3次元的な形状を推定する」のは、それとはレベルがかなり違います。
以上のことを考えると、人間の脳の働きは大変に高度であり、3次元形状を推定することだけをとってみても解明できていないことが分かります。No.233「AI vs.教科書が読めない子どもたち(1)」で紹介したように、国立情報学研究所の新井紀子教授は、
との主旨を書いていましたが、それが思い出されます。もちろん「実用上十分な範囲で、画像から3次元物体形状を推定する」のは、今までも研究されてきたし、今後も研究されるでしょう。立体錯視も「ロボットの目を開発しようという研究」から始まったのでした。杉原教授も、人が立体を認識するメカニズムについて「心理学・認知科学・脳科学などの成果で近い将来、答えが見つかることを期待したい」と書いています。ともかく、
の3つは「3次元世界と、それを覗く2次元の窓(眼)の関係」という意味で、密接に関係していることがよく理解できました。
杉原教授の公開動画
立体錯視や変身立体は動画で見るのが最適です。杉原教授が作られた「不可能モーション(立体錯視)」と「多義柱体(変身立体)」の動画が YouTube で多数公開されています。そのリンクを掲げておきます。
◆不可能モーション2(2009)
◆不可能モーション3(2010)
◆不可能モーション4(2012)
◆不可能モーション5(2013)
◆不可能モーション6(2014)
◆多義柱体1(2014)
◆多義柱体2(2015)
◆多義柱体3(2015)
◆多義柱体4(2016)
今回は、それとは別の直感が裏切られる例をとりあげます。視覚が騙される例、いわゆる "錯視" です。もちろん錯視は昔から心理学の重要な研究テーマであり、数々の錯視図形が作られてきました。その多くは平面図形ですが、今回とりあげるのは立体の錯視です。
明治大学の杉原厚吉教授は数理工学が専門ですが、数々の立体錯視の例を作ってきた(= 発見してきた)方です。その杉原教授が日経サイエンスの2018年8月号に「立体錯視と脳の働きの関係」についての解説を書かれていました。大変興味深い内容だったので、それを紹介したいと思います。それは「我々が視覚によってまわりの立体物をどうやって認識しているのか」というテーマと深く関わっています。そしてこのテーマは人工知能の研究の重要な領域です。
エッシャーの不可能立体
杉原教授が立体の錯視に取り組まれたのはエッシャーの作品の影響が大きいようです。エッシャーの作品を一言でいうと「不可思議な絵(版画)」です。画面を鳥やトカゲが隙間なく埋め尽していたり、蜂が次第に魚に変身していくさまだったりと、いろいろありますが、「不可能立体」による "だまし絵" もエッシャー作品の大きなジャンルになっています。
|
杉原教授があげているエッシャーの《上昇と下降》、《ベルヴェデーレ(物見の塔)》、《滝》の3作品は非常に有名なので、多くの人が知っていると思います。そのうちの《ベルヴェデーレ(物見の塔)》が下図です。
| ||
|
エッシャー
「ベルヴェデーレ(物見の塔)」1958年
(site : www.mcescher.com)
| ||
この作品の1階と2階の関係の中に不可能立体が含まれています。また左下で腰かけている男性が持っている立体も、直方体のフレームとしてはありえない構造をしています。
不可能立体とは「絵には描けるけれど物理的な実体としては不可能な立体」ですが、実は工夫をすれば物理的実体として作ることができます。ただし、従来のやりかたは「不連続のトリック」や「曲面のトリック」を使うものでした。「不連続のトリック」とは、物理的実体として不連続だが、ある視点からみるとあたかもつながっているように見えるというトリックです。また「曲面のトリック」とは、実際はぐにゃっとした立体だが、ある視点から見たときだけ平面からできた立体に見えるというトリックです。ペンローズの3角形と呼ばれる有名な不可能立体を、この2つのトリックで作成した例が次の図です。
| ||
|
ペンローズの3角形の立体化
ペンローズの3角形(a, c)を、不連続のトリック(b)と曲面のトリック(d)で立体化したもの
(日経サイエンス 2018.8)
| ||
ここからが重要な話になります。実は、エッシャーの物見の塔の不可能立体は「不連続のトリック」や「曲面のトリック」を使わなくても物理的実体として作成できることを杉原教授は発見しました。
| ||
|
杉原版・物見の塔
(日経サイエンス 2018.8) | ||
|
杉原教授もあげているエッシャーの有名な作品に《上昇と下降》があります。建物の屋上を周回する階段が描かれていますが、上り続ける人はいつまでも上り続け、下る人はいつまでも下る「無限巡回階段」になっています。
| ||
|
エッシャー
「上昇と下降」(1960年)
(site : www.mcescher.com)
| ||
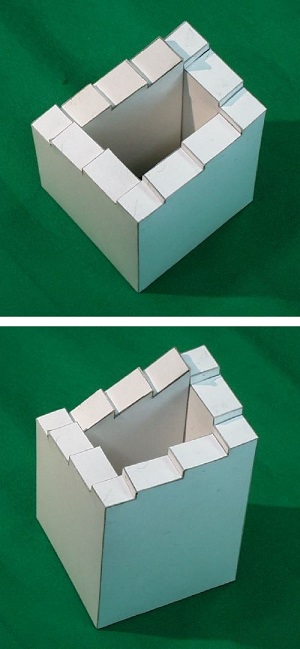
杉原教授はこの「無限巡回階段」も物理的に作成できることを示しました。それが次の図です。
| ||
|
杉原版・上昇と下降
上の写真の位置から見ると「無限巡回階段」のように見えるが、実は下の写真のように "無限上昇(下降)" はしていない。
「不可能立体と不可能モーション」 国立情報学研究所セミナー (2011.6.2)より | ||
「杉原版・物見の塔」と「杉原版・上昇と下降」における重要なポイントは、
| ◆ | つながって見えるところは、物理的実体としてもつながっている。 | ||
| ◆ | 平面に見えるところは、物理的実体としても平面である。 | ||
| ◆ | しかし直角に見えるところに非直角を使っている。 |
の3点です。また、上の引用のところで杉原教授は「線図形からそこに描かれている立体図形を自動抽出できるロボットの目を開発しようという研究の中で私はこのトリックを見つけた」と書いていますが、ここも重要なポイントです。
人間の網膜に写る外界の像は平面です。人間の脳はそこから外界の立体とそれらの位置関係を推定します。それを無意識にリアルタイムに直感的に行っています。どうしてそれができるのか。目が2つあるからというのは当たりません。確かに両目の視差で奥行きが推定できますが、たとえ片目でも、かつ、全く初めての光景に出会ったとしても、立体とその位置関係が推定できます(ためしにやってみると分かる)。
ロボットやそれに相当する機械(自動運転のクルマや建機など)の "眼" も平面の画像センサーでできていて、基本的に人間の目と同じです。周りの状況に応じて動きが変化する精密なロボットを作ろうとすると(たとえば乱雑に置かれたモノを掴むロボット)、平面の画像がら立体を推定する必要がでてきます。クルマで言うとスバルのアイサイトのようなステレオカメラを使うこともできますが、コストアップになるし調整も大変です。あくまで1個のレンズとセンサーで実現したい。
このとき、人間がどうやって立体の認識をしているのかが解明されると、それをロボットに応用できる可能性が大です。杉原教授の研究と産業応用の関係はそうなります。
非直角のトリックによる立体錯視
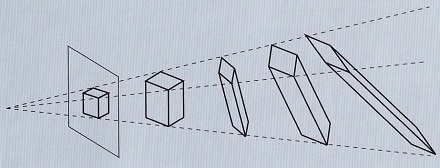
人間は網膜に映る2次元画像から3次元をどうやって推定しているのでしょうか。下図のように、同一の網膜画像に帰着する3次元形状は無限にあります。これらの中から人間は特定のものを直感的に選択しています。「ものを見る」ということはそういうことです。
| ||
|
実世界を認識する目
網膜に映る2次元画像を作れる立体は1つではなく、無限の可能性がある。脳はその中から特定のものを直感的に選択している。
(日経サイエンス 2018.8)
| ||
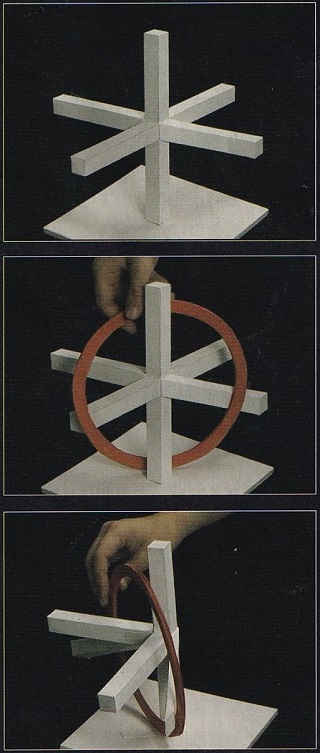
人間はその選択をどうやっているのか。そのことを推測できる立体錯視を杉原教授は作成しています。
|
| ||
|
縦横に配置された4角柱(上)に、硬い赤の輪をかけられる(中)。実は柱の配置はみかけとは全く異なる(下)。
(日経サイエンス 2018.8)
| ||
|
「脳は、画像に映っている立体の無限の可能性の中から直角のなるべく多いものを選らんで即座に思い浮かべてしまう」というのが、杉原教授の仮説です。この脳の作用と関係する錯視が、つぎの変身立体です。
変身立体
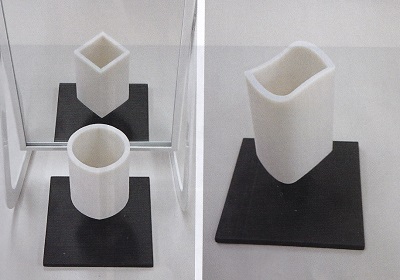
杉原教授は、ある特定の2方向から見ると全く違った形に見えてしまう立体を作成しました。鏡を使うとこの錯視が非常に効果的になります。下の写真の左は、そのまま見ると円柱に見え、鏡を通してみると4角柱に見えます。杉原教授はこのような立体を「変身立体」と名付けました。
| ||
|
変身立体
直接見ると円柱に見えるが、鏡を通して見ると4角柱に見える(左)。実際の物体はそのどちらでもない形をしている(右)。
(日経サイエンス 2018.8)
| ||
|
一つの視点からみると円弧に見え、別の視点から見ると2直線に見える空間曲線の作り方を示したのが次の図です。
| ||
|
変身立体の作り方
水平面 H の上に円弧 A と 2直線 B がある。円弧上を動く点 P をとり、視点 E と視点 F と点 P を含む平面 S を考える。2直線 B と平面 S の交点を Q とし、直線 EP と直線FQ が交わる点を R とする。P が A の上を動くときに Q も B の上を動くが、P と Q の1対1対応がとれるように A と B を決めれば、点 R の軌跡が求める空間曲線 C となる。C を平面 H と垂直な方向に一定距離だけスイープさせれば変身立体の側面ができあがる。この図から、鏡を使って "変身" を演出するためには、鏡の上を手前に少し傾ける必要があることがわかる。
(日経サイエンス 2018.8)
| ||
杉原教授は「変身立体」は2016年の「Best Illusion of the Year Contest」で準優勝しました。その時の動画がYouTubeに公開されています。3Dプリンタの出現によって初めて製作可能になった立体と言えるでしょう。

| ||
|
(YouTubeより)
| ||
立体錯視が提示する課題
立体錯視を起こす人間の脳の振る舞いは、心理学・認知科学・脳科学へ新たな研究課題を提供しているようです。杉原教授はそれを2つに分けて説明しています。
|
動物実験という手はあります。つまり、動物を直角の無い環境で育てることは可能です。ただし、動物が立体錯視を起こしているかをどうやって調べるのか、その方法論が問題です。また、杉原教授もことわっているように「脳は直角を好む」というのは、現時点では仮説です。
|
脳の高度な情報処理
立体錯視は脳の働きによって起こります。つまり脳が現実を裏切ることになるわけです。それはもちろん "脳を騙す" ような立体を人間が意図的に構成したからです。このことを裏返すとどうなるかと言うと、
| 脳は少ない情報(2次元画像)から立体を推定するという高度な情報処理を瞬時にやっている |
ということです。もちろん意図的に脳の "裏をかく" ことはできます。しかしほとんどの場合、脳の瞬時の情報処理は正しいし、我々はそれで問題なく生活しています。脳は2次元画像から物体の形を推定するだけでなく、複数の物体の位置関係を把握します。それは "あたりまえ" であり、我々が疑問をもつことがありません。しかし考えてみると、これはすごいことです。もしコンピュータに(AI技術も駆使して)やらせようとすると非常に難しい。
画像から物体を認識することだけなら実用化されています。たとえば前方衝突防止ブレーキがついたクルマでは、この機能を単眼カメラの画像だけでやっています。これは前方にあるクルマ、歩行者、バイク、自転車など、道路の上によく現れる物体の知識をもとにして画像から物体を判定しているわけです。そして道路と物体の接地部分を画像で判定し、単眼カメラの地上高と仰角から三角測量の原理で距離を計算している。つまり「事前知識をもとに画像から物体を検出し、物体までの距離を推定する」ことなら実用になっています。しかし、人間の脳がやっているような「事前知識なしに、画像だけから物体の3次元的な形状を推定する」のは、それとはレベルがかなり違います。
以上のことを考えると、人間の脳の働きは大変に高度であり、3次元形状を推定することだけをとってみても解明できていないことが分かります。No.233「AI vs.教科書が読めない子どもたち(1)」で紹介したように、国立情報学研究所の新井紀子教授は、
| 人間の知性と同等ベルのAI(=真の意味でのAI)はまず無理である。なぜかというと、人間の知能の原理が解明されていないからであり、解明するにも人間の知能を科学的に観測する方法がそもそもないからだ。自分の脳がどう動いているか、何を感じていて、何を考えているかは、自分自身もモニターできない。 |
との主旨を書いていましたが、それが思い出されます。もちろん「実用上十分な範囲で、画像から3次元物体形状を推定する」のは、今までも研究されてきたし、今後も研究されるでしょう。立体錯視も「ロボットの目を開発しようという研究」から始まったのでした。杉原教授も、人が立体を認識するメカニズムについて「心理学・認知科学・脳科学などの成果で近い将来、答えが見つかることを期待したい」と書いています。ともかく、
| ◆ | エッシャーの不可能立体 | ||
| ◆ | 立体錯視 | ||
| ◆ | 立体形状を推定できるロボットの眼 |
の3つは「3次元世界と、それを覗く2次元の窓(眼)の関係」という意味で、密接に関係していることがよく理解できました。
杉原教授の公開動画
立体錯視や変身立体は動画で見るのが最適です。杉原教授が作られた「不可能モーション(立体錯視)」と「多義柱体(変身立体)」の動画が YouTube で多数公開されています。そのリンクを掲げておきます。
◆不可能モーション2(2009)
◆不可能モーション3(2010)
◆不可能モーション4(2012)
◆不可能モーション5(2013)
◆不可能モーション6(2014)
◆多義柱体1(2014)
◆多義柱体2(2015)
◆多義柱体3(2015)
◆多義柱体4(2016)
2018-08-03 19:37
nice!(0)



